
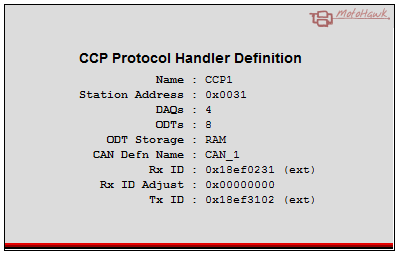
CCP CAN Protocol Handler
Use this MotoHawk™ block to manage handling of a CAN Calibration Protocol (CCP) connection via CAN.
Block ID
CCP CAN Protocol
Library
MotoHawk_lib/CCP Slave
Description
CCP (CAN Calibration Protocol) is a standard intended to create a common interface to electronic control modules. It is possible to use multiple instances of this block, giving each a unique Name, and thus implement multiple CCP handlers. For more information on CCP, see CAN Calibration Protocol.
The list of data acquisition (DAQ) triggers is pre-selected to:
- FGND_RTI_PERIODIC
- FGND_2XRTI_PERIODIC
- FGND_10XRTI_PERIODIC
- FGND_20XRTI_PERIODIC
- BGND_BASE_PERIODIC
- BGND_BASEx2_PERIODIC
- BGND_BASEx10_PERIODIC
- ONE_SECOND_EVENT
The CCP Command packets are responded to in IDLE time of the application. To implement a different triggering scheme, use the CCP CAN Protocol External Trig block from the CCP Slave Library, and supply triggering to the Command Trigger input with a MotoHawk Trigger block.
Supported operations: upload calibrations, download calibrations, data acquisition, seed and key security.
Not supported: Flashing operations
Block Parameters
| Parameter Field | Values | Comments/Description |
|---|---|---|
| CCP Handler Name | Alpha-numeric text, single-quote enclosed | Enter unique name for this handler instance. No special characters, such as spaces, dashes, commas (underscore allowed). |
| CCP Station Address (16-bit integer) | hex2dec('value') | Define the address that will used to communicate via the CCP Handler. On a CAN bus with multiple MotoHawk enabled modules, The Instrumentation Tool can communicate with each module via the respective station address. Therefore, each CCP handler on a bus MUST have a unique address. |
| CAN Definition Name | Alpha-numeric text, single-quote enclosed | Specify which CAN bus you want to use - as defined in the CANDefinition block. |
| Receive ID (CRO) | hex2dec('18ef0231') | Specify ID to be used for CCP communication of Command Request Object (CRO). |
| Receive ID Type (0=Std, 1=Ext) | 0 or 1 | Specify 0 for Standard (11-bit identifiers), 1 for Extended (29-bit identifiers) on the CAN bus. |
| Receive ID Mask | hex2dec('1FFFFFFF') | Specify Receive ID Mask |
| Transmit ID (DTO/DAQ) | hex2dec('18ef0231') | Specify Transmit ID for Data Transfer Objects and Data Acquisition. |
| Transmit ID Type (0=Std, 1=Ext) | 0 or 1 | Specify 0 for Standard (11-bit identifiers), 1 for Extended (29-bit identifiers) on the CAN bus. |
| Total Number of DAQs (0-253) | 0-253 |
Set the number of Data Acquisitions (DAQs) for the CCP. DAQs are lists of
automatically transmitted signals. |
| Total Number of Object Descriptors (ODT) per (DAQ) (1-253) | 11-253 | Set the number of Object Descriptors (ODTs) per Data Acquisitions for the CCP. ODTs determine the length of each DAQ list. |
| Store DTs in NonVolatile (0=RAM, 1=EEPROM, 2=CAL) | 0, 1, 2 | Select choice of Storage for Object Descriptors |
| Send "Command Processor Busy" response prior to long memory writes | checkbox (default = unchecked) | The download of calibrations has the possibility of exceeding the allotted timeout for the DNLOAD command (25 ms). Some calibration tools are capable of extending this timeout if an initial "Command Processor Busy" response is received within the normal timeout period. Checking this option will enable the sending of a "Command Processor Busy" response as soon as a DNLOAD command is recieved where the data will be writing to EEPROM space. |
| Instrumentation Group | Alpha-numeric text | Defines Folder name and hierarchy for use by a suitable Instrumentation Tool. Use "|" character between folder names to delineate subfolder structure. |
Note:
Setting the "Command Processor Busy" checkbox to checked has been necessary when the combination of
ETAS INCA
and the MotoHawk target ECU565-128 are being used together.