Debugging Using CANking
From MotoHawk
Jump to navigationJump to searchKvaser CANKing can be used to test communication with the ECU.
CANKing can be downloaded from the Optional Files page of the downloads section of MotoTron.com.
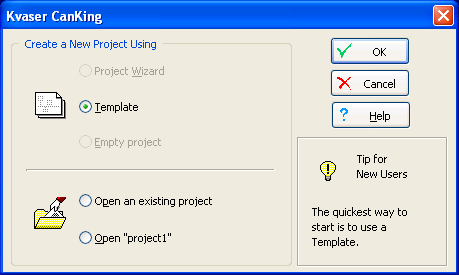
- Open CANKing from the start menu
- Select Template
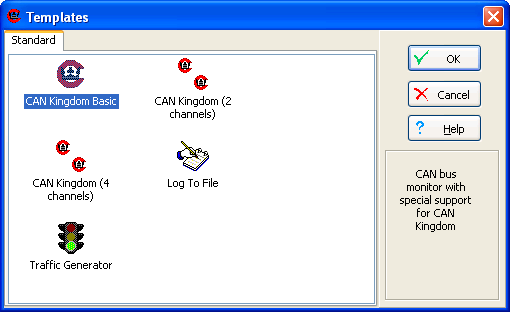
- Select CAN Kingdom Basic
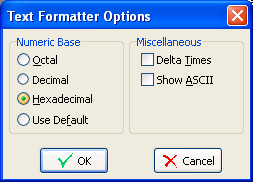
- In the Select Formatters window click Standard Text Format in the Active Formatters in Order of Execution list and click the Options button
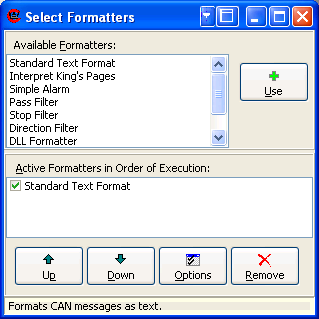
- Select Hexadecimal under Numeric Base
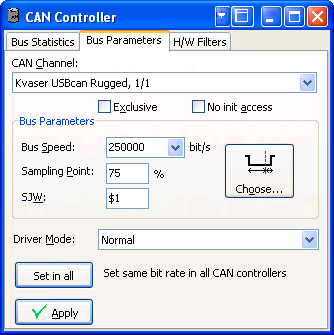
- In the CAN Controller window, go to the Bus Parameters and choose the proper CAN Channel and Bus Speed
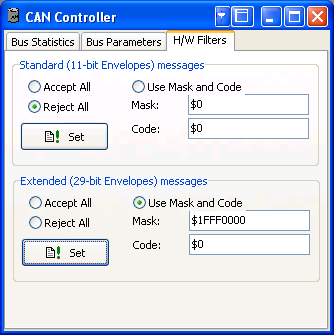
- On the H/W Filters tab choose reject all for Standard messages and choose Use Mask and Code with mask $1FFF0000 and Code $0 for Extended messages. This will filter out non-MotoTune related messages.
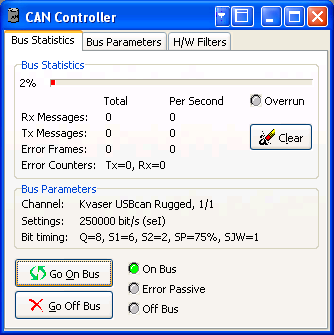
- In the Bus Statistics tab click Go On Bus
- Open the Univeral CAN mesage window under Messages, Universal, Universal

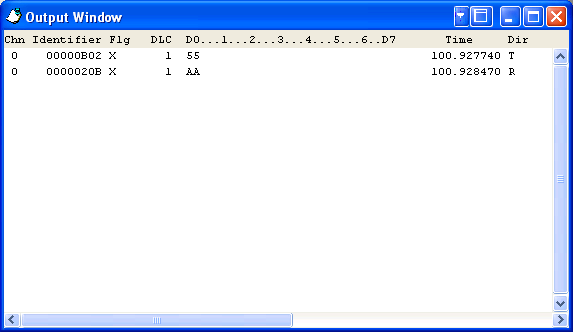
- In the CAN Mesage window set CAN Identifier to $0B02x, DLC to $1, and Byte 0 to $55. This is a message with extended ID 0B02 hexadecimal, data length of 1 byte, and first byte set to 55 hexadecimal. 0B indicates the destination is City-ID 0B hex or 11 decimal, also known as PCM-1. If you are using a different City-ID. 02 indicates City-ID 2, the default City-ID used by MotoTune. 55 in byte 0 is basically a ping message, to check if a module is alive. Click the Send button to send the message.
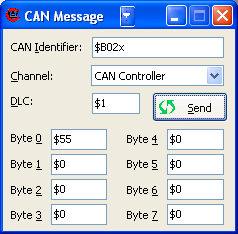
- The module should respond with message ID $020Bx and data $AA.
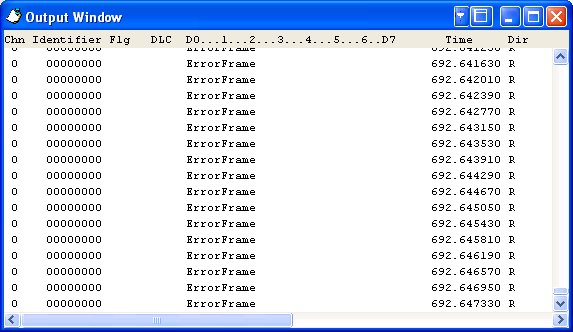
If no modules are on the bus, the wrong bus speed was select, the wrong bus was select, or the CAN bus was improperly terminated you will get Error Frames indicating this. If you have used the wrong City-ID, even is the module it there, you will get no response.